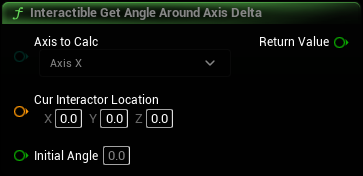
Interactible Get Angle Around Axis Delta
Returns (in degrees) the delta rotation from the initial angle at grip to the current interactor angle around the axis
Expects CurInteractorLocation to be in relative space already
You can add this to an initial rotation and clamp the result to rotate over time based on hand position
Inputs
|
Axis to Calc
EVRInteractibleAxis Enum
|
|
|
Cur Interactor Location
Vector
|
|
|
Initial Angle
Float (single-precision)
|
Outputs
|
Return Value
Float (single-precision)
|
Returns (in degrees) the delta rotation from the initial angle at grip to the current interactor angle around the axis |