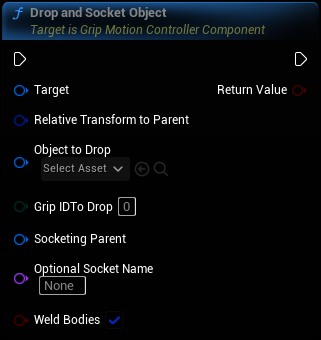
Drop and Socket Object
Drops a gripped object and sockets it to the given component at the given relative transform.
*Note*: If both the parent and the child are simulating it also delays a single tick and then re-applies the relative transform.
This is to avoid a race condition where we need to wait for the next physics update.
Inputs
|
In
Exec
|
|
|
Target
Grip Motion Controller Component Object Reference
|
|
|
Relative Transform to Parent
Transform Net Quantize Structure (by ref)
|
|
|
Object to Drop
Object Reference
|
|
|
Grip IDTo Drop
Byte
|
|
|
Socketing Parent
Scene Component Object Reference
|
|
|
Optional Socket Name
Name
|
|
|
Weld Bodies
Boolean
|
Outputs
|
Out
Exec
|
|
|
Return Value
Boolean
|
Drops a gripped object and sockets it to the given component at the given relative transform. |