Grip Actor
Grip an actor, these are stored in a Tarray that will prevent destruction of the object, you MUST ungrip an actor if you want to kill it
The WorldOffset is the transform that it will remain away from the controller, if you use the world position of the actor then it will grab
at the point of intersection.
If WorldOffsetIsRelative is true then it will not convert the transform from world space but will instead use that offset directly.
You could pass in a socket relative transform with this set for snapping or an empty transform to snap the object at its 0,0,0 point.
If you declare a valid OptionSnapToSocketName then it will instead snap the actor to the relative offset
location that the socket is to its parent actor.
It will only do this if the WorldOffset value is left default, if it is not, then it will treat this as the name of the slot
that you already have the transform for.
If you declare a valid OptionalBoneToGripName then it will grip that physics body with physics grips (It will expect a bone worldspace transform then,
if you pass in the normal actor/root component world space transform then the grip will not be positioned correctly).
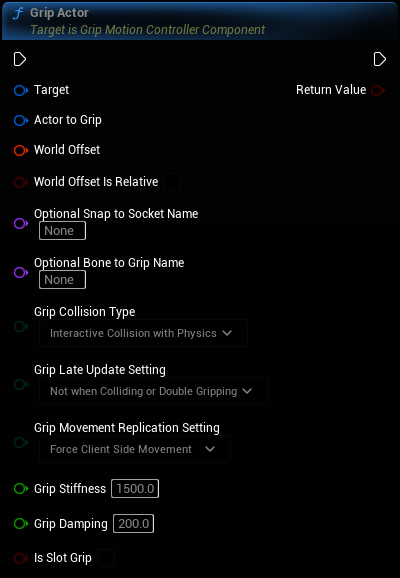
Inputs
|
In
Exec
|
|
|
Target
Grip Motion Controller Component Object Reference
|
|
|
Actor to Grip
Actor Object Reference
|
|
|
World Offset
Transform (by ref)
|
|
|
World Offset Is Relative
Boolean
|
|
|
Optional Snap to Socket Name
Name
|
|
|
Optional Bone to Grip Name
Name
|
|
|
Grip Collision Type
EGripCollisionType Enum
|
|
|
Grip Late Update Setting
EGripLateUpdateSettings Enum
|
|
|
Grip Movement Replication Setting
EGripMovementReplicationSettings Enum
|
|
|
Grip Stiffness
Float (single-precision)
|
|
|
Grip Damping
Float (single-precision)
|
|
|
Is Slot Grip
Boolean
|
Outputs
|
Out
Exec
|
|
|
Return Value
Boolean
|
Grip an actor, these are stored in a Tarray that will prevent destruction of the object, you MUST ungrip an actor if you want to kill it |